Luckily I saw a frame sold as Super H600 Quadcopter at HobbyKing that may be good enough for my needs. It's not the best, but what appealed to me is the use of the F450 arms. I had spare parts of the F450 and I also had a V550 which is really a F450 frame with a different layout. Below is the maiden flight with is pretty much using stock components and my spare motors and props.
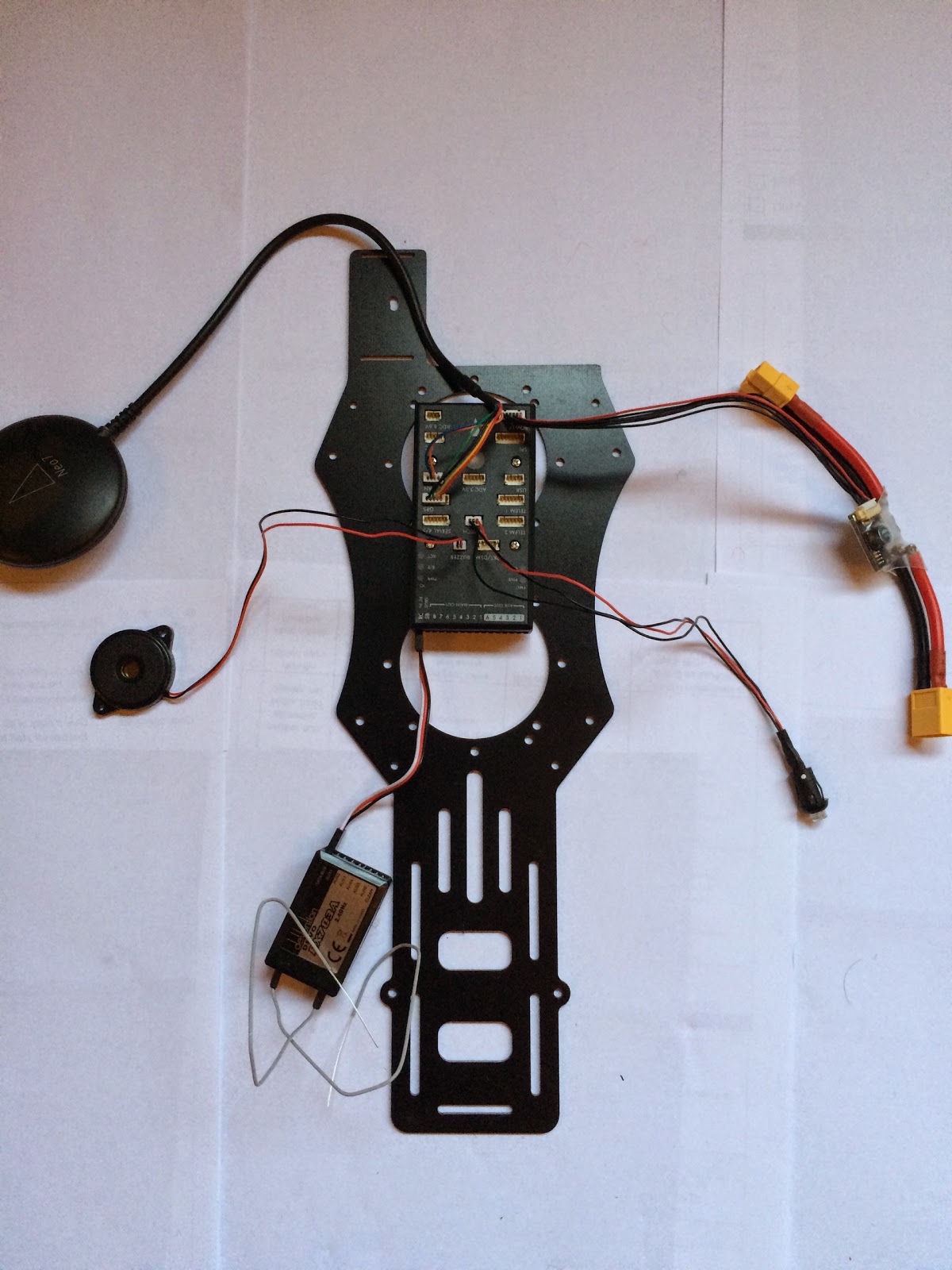
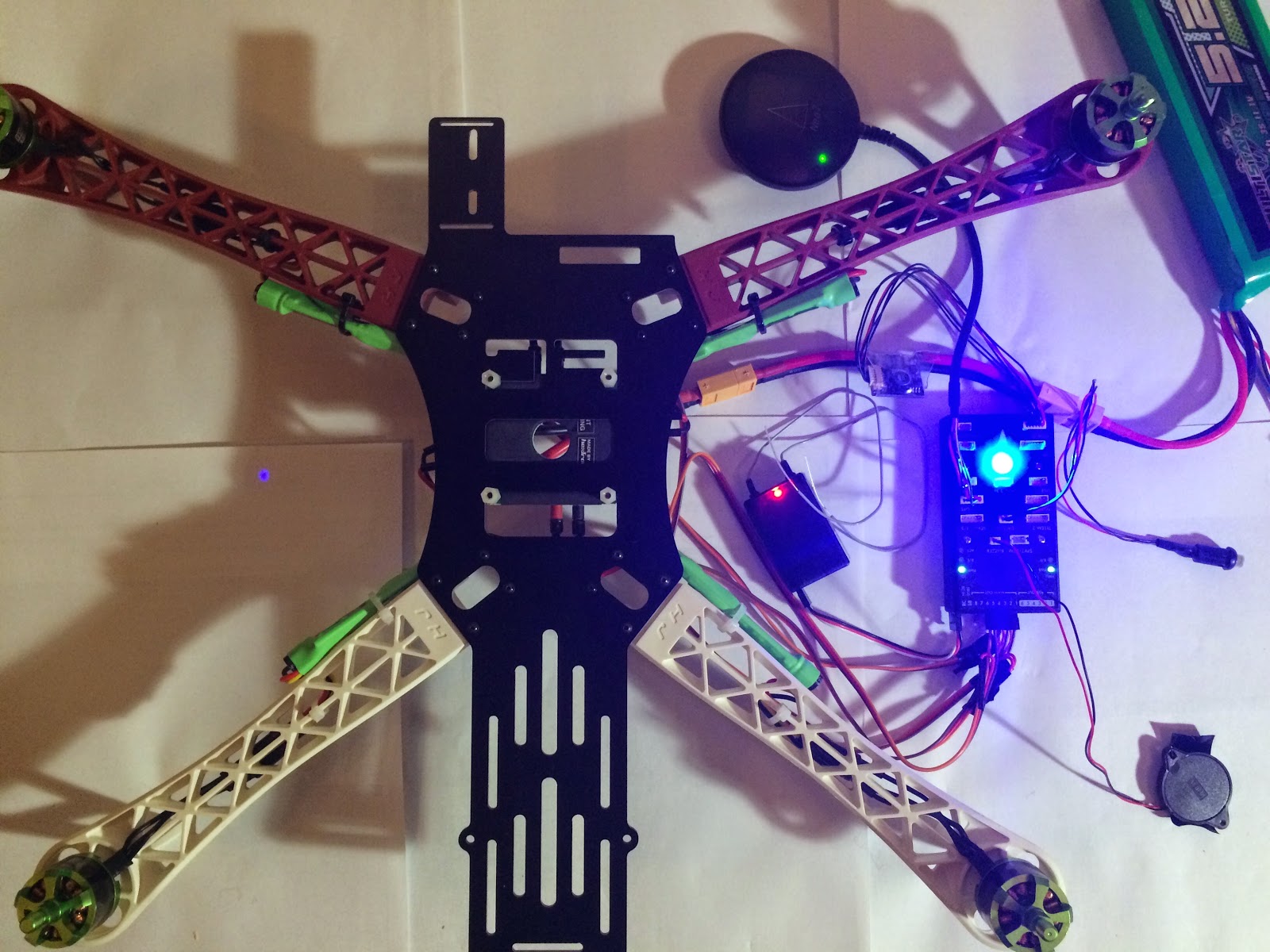
I started with H600 frame, my spare/test parts 2212 Multistar motors, 1038 Gemfan props and Tmotor Air 20a ESC. The flight controller (FC) is the HK Pilot APM micro, which I bought as a set, which included GPS, OSD, telemetry radio.
The basic frame was definitely bigger which is great as it's not cramped as the F450, however it's also heavier. I then thought that it will not be possible to use just the same 2212 motors as the F450. I decided to buy some extended arms, this was I can go with much bigger propellers for more thrust. I decided to put an extended upswept arms from Diatone. I was thinking the quad is pretty much a H-frame so the upswept geometry should only affect the roll and not much of the pitch. On my first flight to test the extended arms I decided to also test the high wind performance of the build. The test went well, it flew well despite the high wind and underpowered motors. Unfortunately on my last segment of the flight while bringing it for a landing I did a roll and a gust of wind flipped it. I suffered my first real crash since I started on the hobby.

I decided to buy another H600 frame and do a rebuild. On the rebuild I added 4 more standoffs (2 on each side) on the bottom frame, close to where the weak point is. Below you can see on the side the 2 additional standoffs. I also added the old broken bottom plate on the build, to make a double plate. Since the 2212 and 2213 does not have enough to thrust to lift the frame well. I went for a 4006 740kv motors, to keep the budget low I went for the Multistar Elites. I then coupled it with APC 1245 propellers. The 740kv motors allowed me to keep my existing 3S batteries and ESC. I did not went for the super low KV motors as that would require me to buy new ESC instead of using my spares and series my 3S battery or buy 6S. With this setup a AUW 2kg (3 axis gimbal, fpv, osd included) has about 8 to 12 mins flight time.

I added some functional bling to the frame, LED lights. This helped me a bit for LOS flying or my spotter to track it.


I think the build went pretty well, below is the video that I was able to take with the H600. This is literally the 1st and 2nd flight outside of test flights.
Some more build notes for my reference.
On my Walkera Devo 10 to have 6 flight modes I have done the following:
Travel Adjust Gear
+83.0%
-100.0%
Subtrim Gear: -30.0%
Program Mix 1
Master: Flap
Slave: Gear
Pos 0 Up: +65%
Device Output
Gear: Mix SW
Flaw: Gear SW
- Channel 5 for lost model alarm
- Setup failsafe gear +100% which would put it into RTL flight mode
- Use fixed ID for quick recovery of signal
- Reverse Elevator, Aileron and Rudder channels
- Gimbal on aux 4, travel adjust 65% 65%
Setup of APM micro 2.7
- Firmware Arducopter 3.2.1
- Frame type H
- APM with external compass (needed to cut the link on the board)
- radio calibration.
- COMPASS_ORIENT = 12 (gps pointing backwards, MAYBE WRONG NEED TO CHECK)
- PILOT_VELZ_MAX = 350 make it move faster
- THR_DZ = 50 drop dead zone
- extended tuning

I covered the barometer, with makeup foam. This way the reading with not be erratic because of propeller wash and sunlight.