Since this is a cheap frame, I should have thought not all screws will be provided. It did not have any screws for the motor, luckily I had 8 spare... but I needed 16. I went to 2 hardware store and 1 auto store, none of them has a M3 that is 6mm short. I am glad my neighbour has heaps of RC parts, as he used to own a hobby shop and still has a few planes of his own.
The Pixhawk FC is a open source hardware and software platform. Much like Linux before, there are lots of loose documentation. I almost bricked my FC after 2 failed firmware updates. Also did not realise there are 2 different firmware for it.
I have got also some failed parts, which I did not order extra parts on. 1 of the ESC has failed, must be dud... or I smoked it after a few mins. Wrong firmware on the FC perhaps. The safety switch LED also does not work.
Anyway ordered the failed parts and I need to start reading more about the Pixhawk.. maybe next week things will all work and go as planned.
Tuesday, October 28, 2014
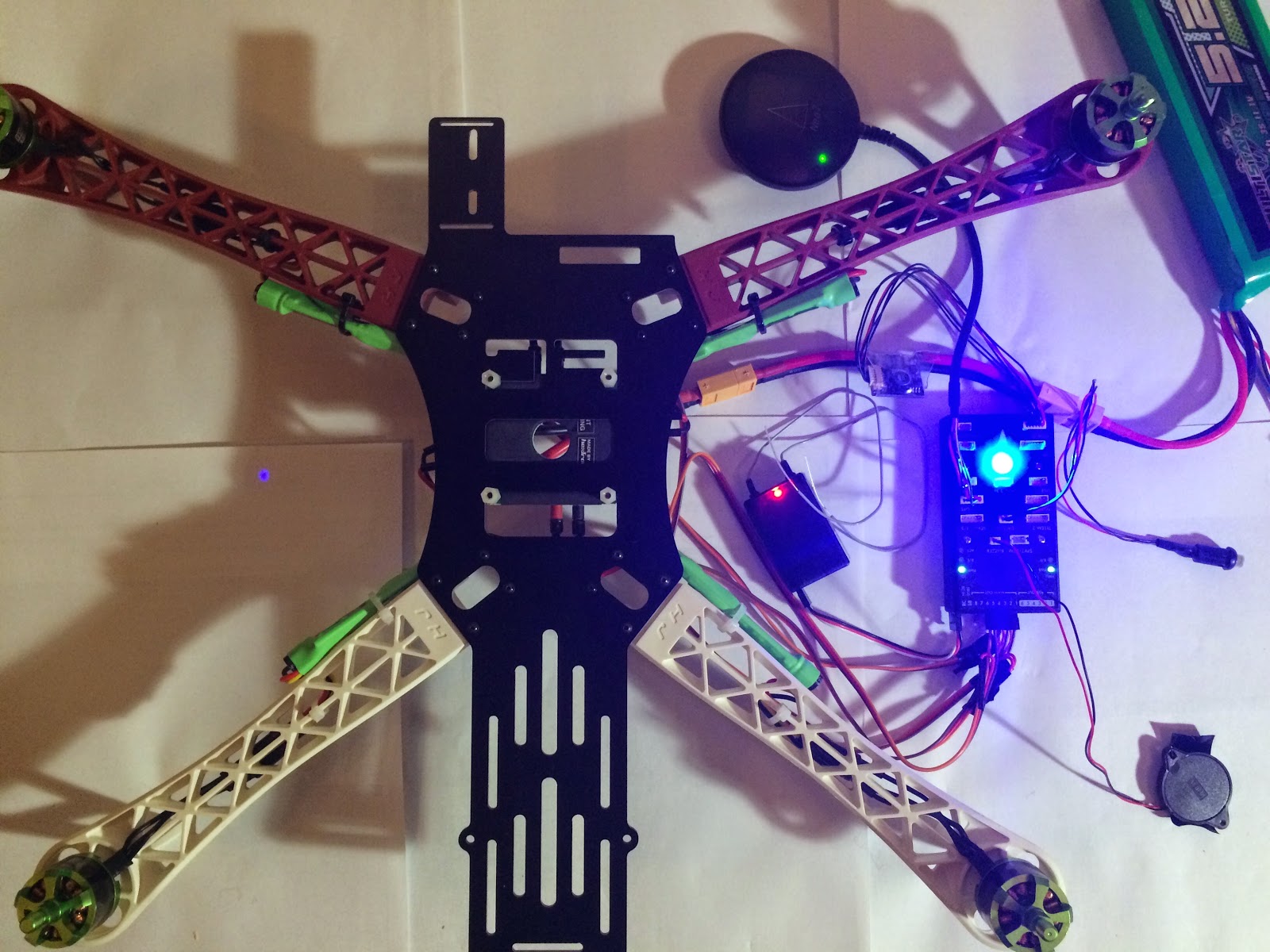
Building a cheap quad. Step 4: Put together the top and bottom plates of the Reptile V550
After a lot of trial and error, hand gymnastics... surprisingly all the electronic parts fit when I sandwich the top and bottom plates together. This is not a kit, no instructions and I had no idea everything will fit.
The bottom plate main consist of the flight controller, receiver. While the toplate has the power distribution board, gimbal board. As you can see on the photos the flight controller has only a few mm to room to spare.




The bottom plate main consist of the flight controller, receiver. While the toplate has the power distribution board, gimbal board. As you can see on the photos the flight controller has only a few mm to room to spare.
Building a cheap quad. Step 3: Setup the HK Pilot32 (Pixhawk clone) Flight Controller (FC)
I always wanted to have a Pixhawk FC, but I am on a budget. So a clone of it, the HK Pilot32 will do
I did not realise there where a few choices for ground station software and firmware. I initially used qgroundcontrol and flashed the firmware. The 1st flash failed, gladly a 2nd flash worked. I went through some calibration steps, some of the documentation is a bit outdated. To matters worse I did not realise that there are different ground station software and firmware, so doing a google on pixhawk may give you links to different ones. Example there are a slight variation from the qgroundcontrol and APM mission planner buzzer/beep codes.
My safety switch LED light also is not working.
I did not realise there where a few choices for ground station software and firmware. I initially used qgroundcontrol and flashed the firmware. The 1st flash failed, gladly a 2nd flash worked. I went through some calibration steps, some of the documentation is a bit outdated. To matters worse I did not realise that there are different ground station software and firmware, so doing a google on pixhawk may give you links to different ones. Example there are a slight variation from the qgroundcontrol and APM mission planner buzzer/beep codes.
My safety switch LED light also is not working.
Building a cheap quad. Step 2: Wire in Motors and Electronic Speed Control (ESC)
I screwed on the motors, being a cheap frame it does not come with screws. You will need an extra 16pcs of M3x6mm. Luckily I had some spares, but only 12 pcs. For now I only have 3 screws per motor. While I was busy using zip ties for the cables, my daughter was also busy using zip ties for some art. I had to also move the PDB lower, as my ESC cables on the rear is too short.


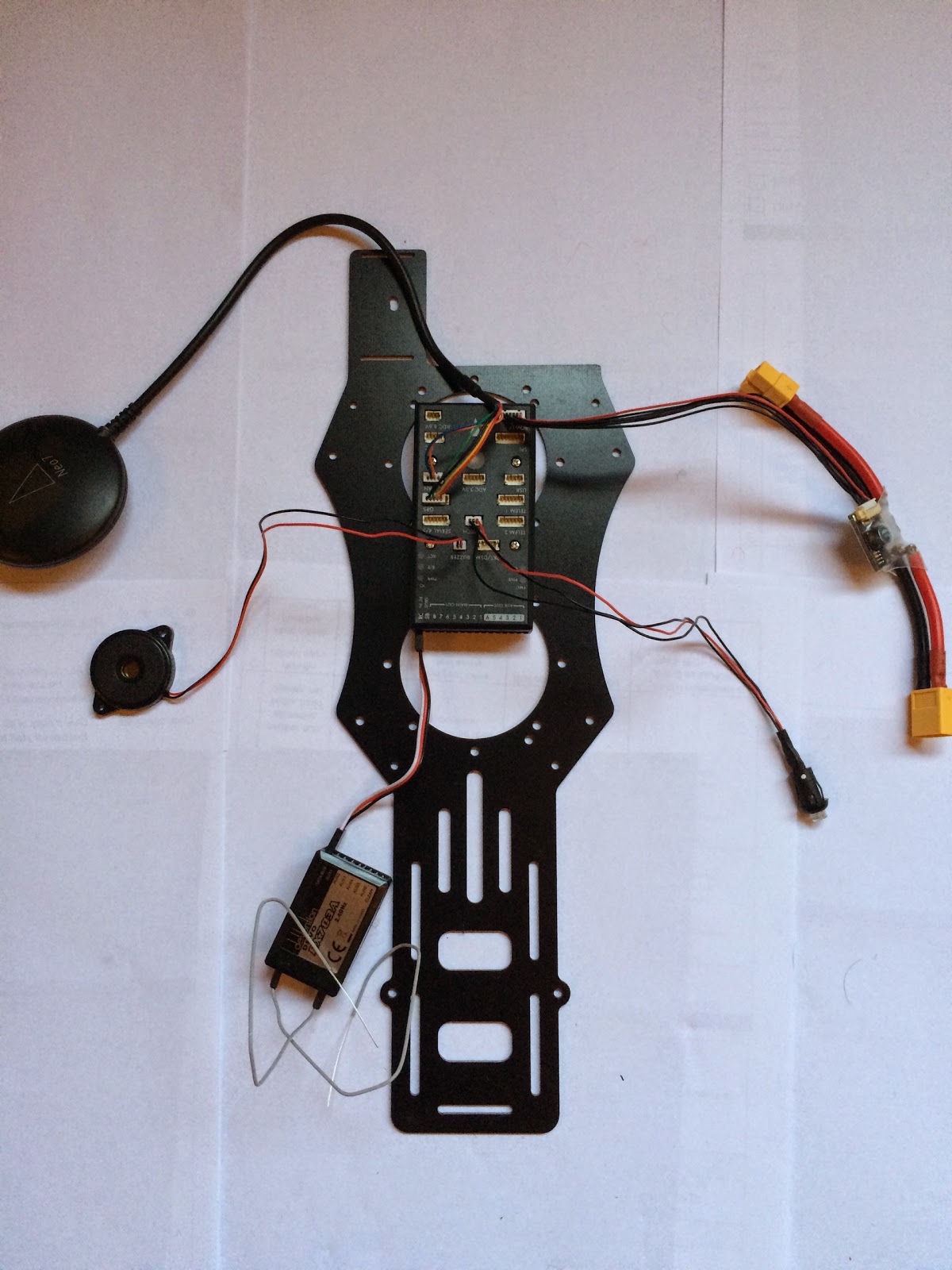
Building a cheap quad. Step 1: Mount the power distribution board (PDB) to the Reptile V550 (v2) frame
The Reptile V550 (v2) is a cheap frame, so it does not have any instructions. Luckily the PDB just fits enough the top frame after a few trial and error of using different screws and mounts. I used a M3 screw and a nut, I also eventually lowered it a bit later from this photo to accommodate the gimbal board.
Also pictured here is side by side comparison with my current DJI F450 arms. The cheaper one is not as white and narrower, it seems to be just as stiff though.



Also pictured here is side by side comparison with my current DJI F450 arms. The cheaper one is not as white and narrower, it seems to be just as stiff though.
Starting to build a cheap but good quad copter
I decided to build a cheap but good quad copter. My initial target is cost 1/2 or less of my current dji F450 with a E300 propulsion system. And it must be just as good or better.
The 2nd quad will serve more as a FPV and UAV platform. I ended up with the following parts:


- Reptile 550 v2 with 1 axis gimbal ($66). This is a TBS Discovery clone, which should be good for FPV and shares arms with F450, motors, esc for sharing spares.
- Multistar 2212/920kv ($45). So I can share/use the DJI 9443 and 9450 props. I also like the easy off and on of the self locking props. I wanted a Sunnysky 2212/980kv but it seems I can't use the self locking props on it w/o the rare adapter. Another E300 set is too expensive, I can however move the E300 to it.
- Multistar 20A BLHeli ESC ($10 x 4). Initially wanted a simonk based ESC such as the Afro. I read there where a few issues especially for a Pixhawk flight controller. So I opted for the BLHeli ESC.
- HK Pilot32 ($130). Always wanted a Pixhawk, I want to do some UAV and possibly coding but could not afford a 3D Robotics made one.
- Ublox Neo 7m GPS ($34)
- Minim OSD ($21). Will do more FPV, so I guess OSD is now a must.
- power distribution board ($4). Reptile V550 does not have a built in distribution board unlike a TBS Discovery.
- Nanotech apec g2 ($56)
- Walkera RX703a ($29). I have a walkera radio, as I share it flying the F450, Ladybird and Master CP. The RX703a also use PPM signal which works for the Pilot32
Sunday, October 5, 2014
Final adjustment and testing of gains for dji F450
Having added the FPV I needed to adjust the gains. Increased the pitch and roll a bit so it can handle the wind better. Lowered the Altitude pitch and roll as it seems to make it less jerky. Significantly increased the vertical, so it would not descend when moving.
Basic
150% Pitch 150% Roll 120% Yaw 200% Vertical
Altitude
110% Pitch 110% Roll
I tested the gains on a very windy condition in atti mode.
Final testing and adjustments. Wellington strong winds is the best place to give it a real world test. Not brave enough to go over water though, gust can really take the quad down as seen on one of the crash.
Basic
150% Pitch 150% Roll 120% Yaw 200% Vertical
Altitude
110% Pitch 110% Roll
I tested the gains on a very windy condition in atti mode.
Final testing and adjustments. Wellington strong winds is the best place to give it a real world test. Not brave enough to go over water though, gust can really take the quad down as seen on one of the crash.
Subscribe to:
Posts (Atom)